The goal of the project is to explore possibilities of a robotic arm to tattoo humans.
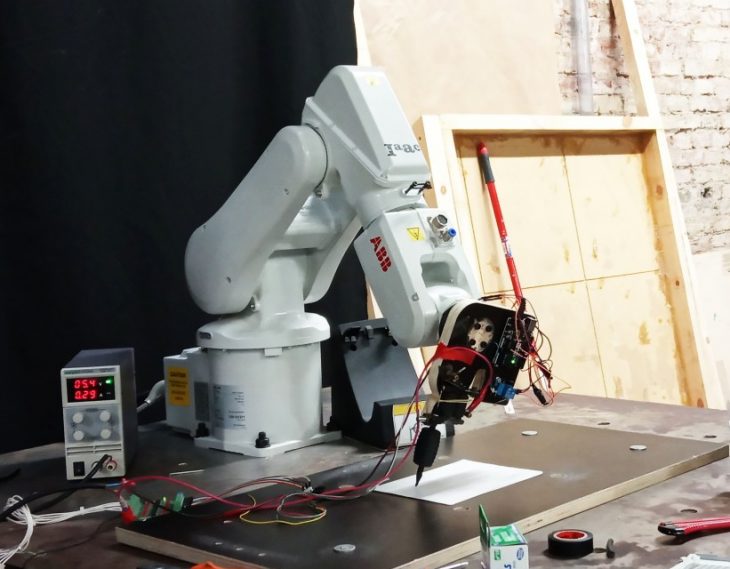
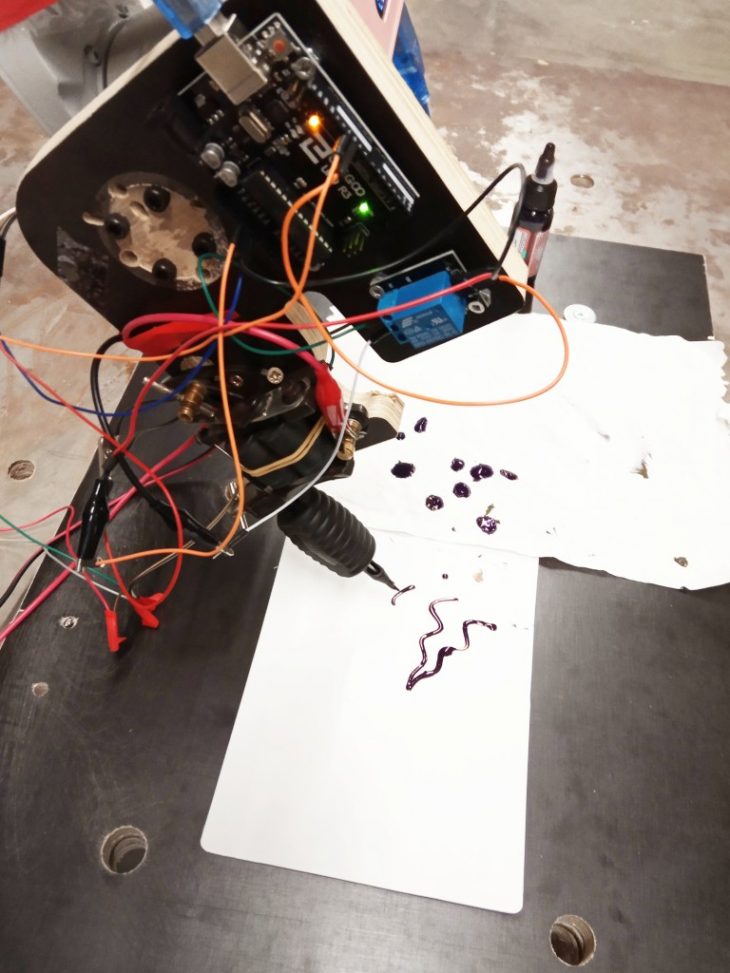
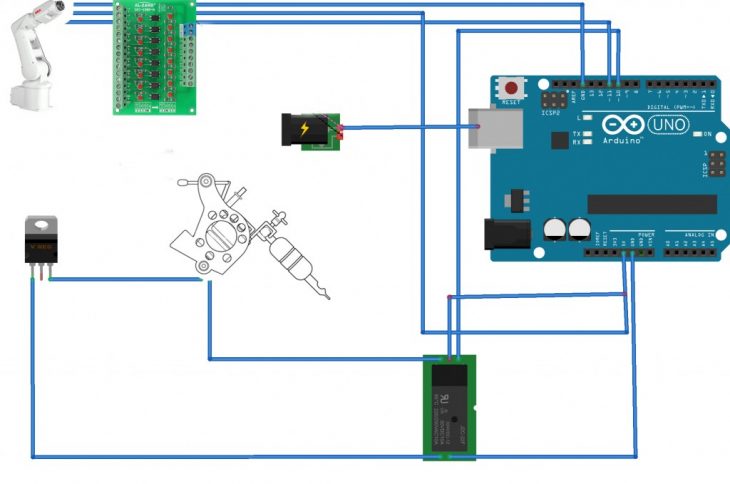
The end effector for a robot comprises the tattoo machine and an Arduino kit that controls the incoming voltage. In the first iteration of the project, we have manufactured a process to work on flat surfaces. This simplified approach helped us identify the few key problems.
- As the optimal tattooing angle is 45degrees, the direction in which the tattooing machine is held can affect damaging of the skin.
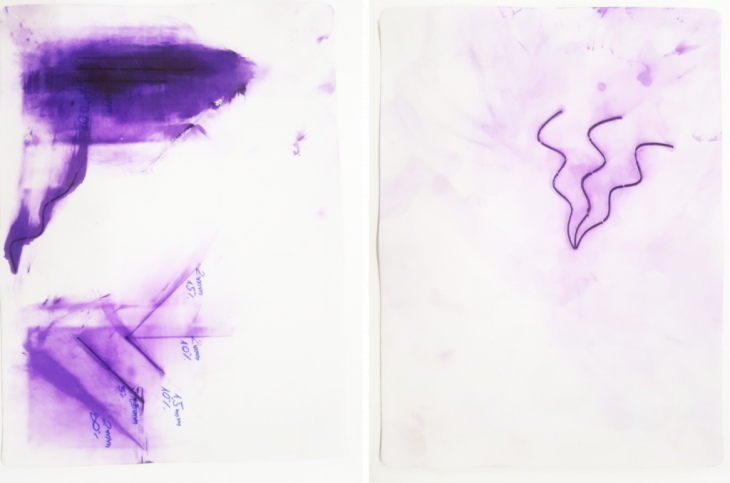
- The accuracy is the key aspect of the project, 0.5mm of difference makes a huge difference.
- The ink needs to be applied multiple times during the making of a single line.
- Due to an accuracy of the robot, you can distinguish multiple tips of a single needle. The line should be repeated with multiple offsets to minimize that effect.
Credits: Filip Bielicki, Andrzej Foltman
Faculty: Angel Muñoz