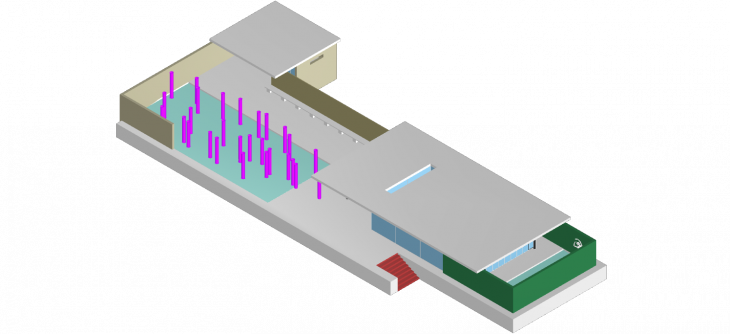
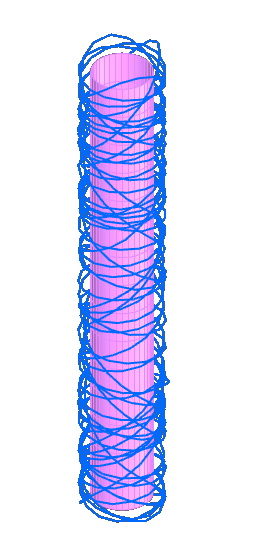
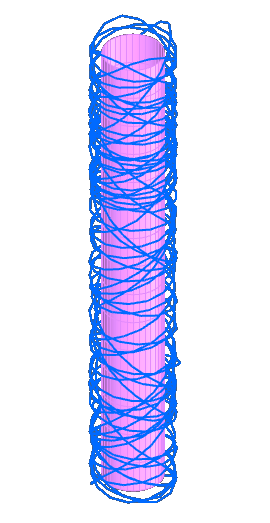
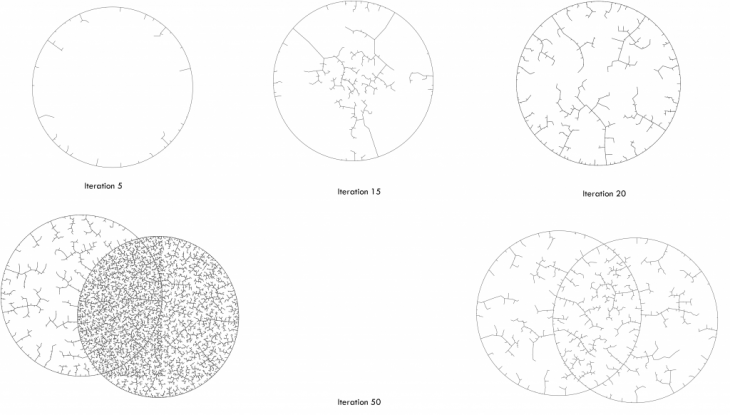
The “Swarm Behaviour” in order to reach this sort of behaviours by using looping or recursive system. The first thing is how we can control the” Agents “? and how we can develop this behaviour to be compatible with different iterations in one transformation function for one loop.
-We can illustrate the “Agents” is the initial geometry that is “point”, “Vector”, and line that is going to make sort of transformation function around specific geometry as guide or path.so, the looping system has the ability to record this transformation with different iterations numbers.
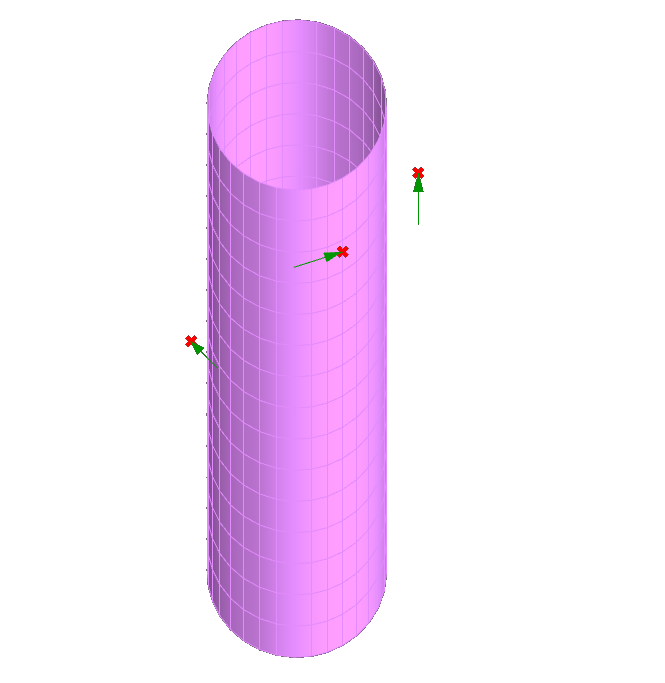
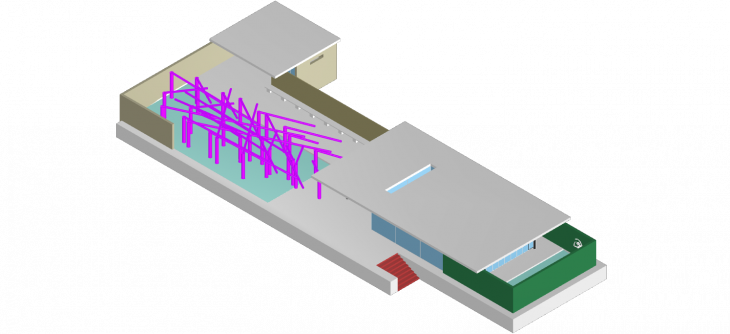
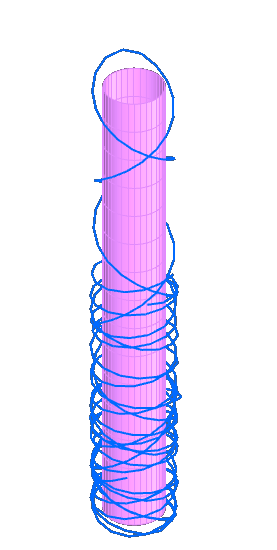
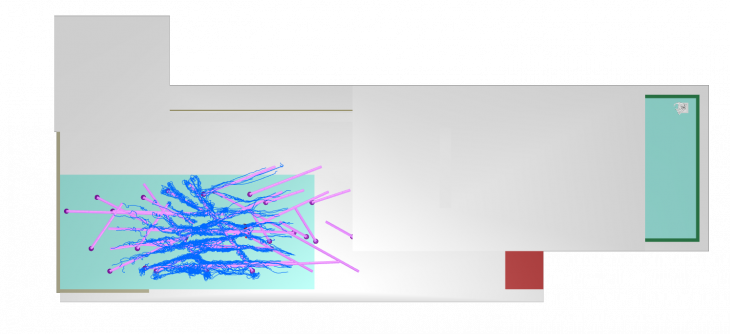
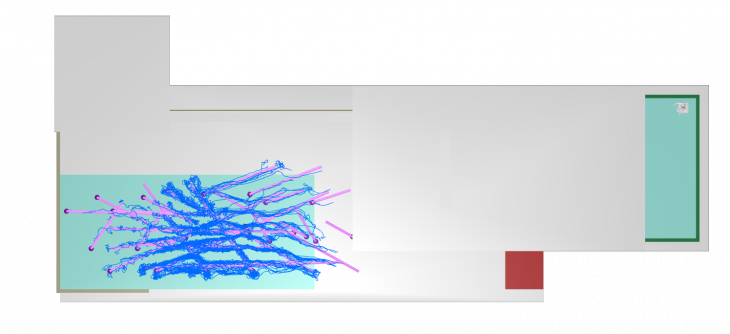
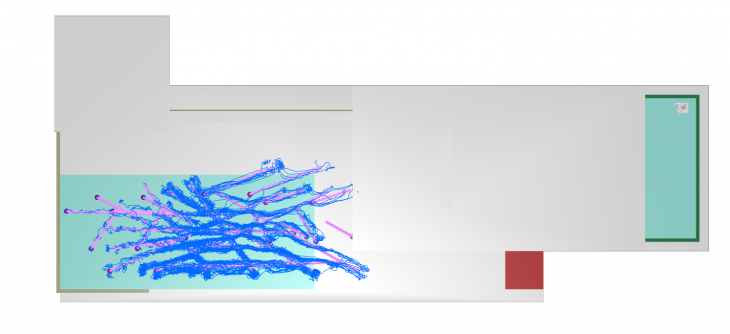
-So, as you can see in this diagram there are three points that are moving around geometry based on three types of Vectors
random vectors, “slide vector” and “stick to geometry” vector. I will illustrate a bit about “boids library” and the recursive
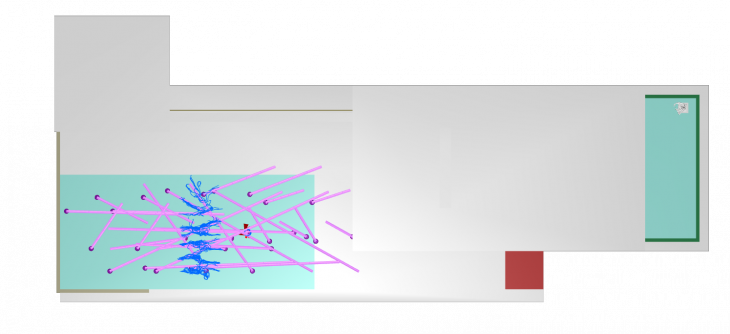
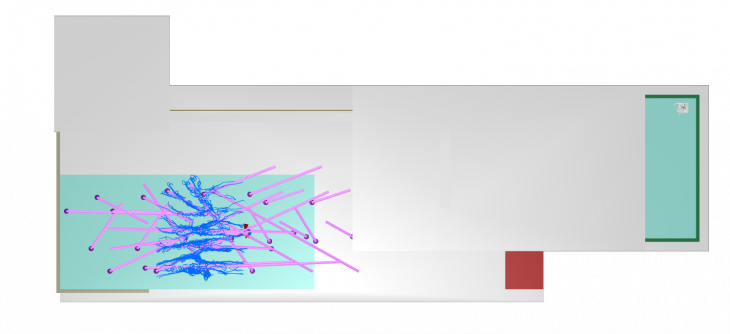
system components. So, Basically, these vectors have some specific details different from the regular vector which is consist
of two terms magnitude and direction.so, the difference you can control these vectors to do any kind of transformation
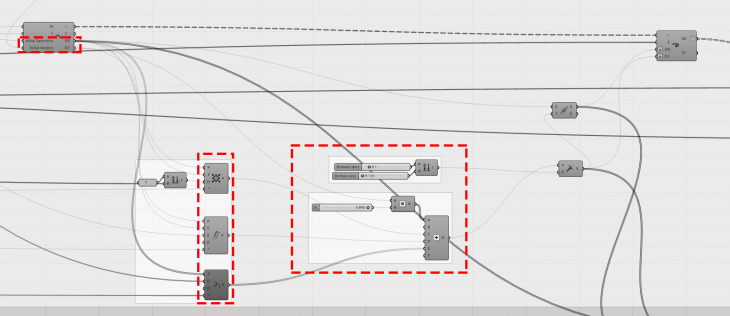
around specific geometry, you can consider as a path for your transformation, and looping components as you can see in the
last script diagram showing the points as initial geometry to start the growth of the lines or any kind of geometry controlled