The usage of ROS SLAM navigation to generate a pointcloud to create the 3d mesh model of the first floor of Atelier, doing a comparison with photogrammetry.
The final output is deply understand the usage of the space, making a confrontation between the Design Intent and the real use of enviorement.
The final aim of the project is create a 3d point cloud to compare to the path analysis to better understanding of the pace in a space optimization.
Objectives
Use technology to our advantage to collect and store data of activities that are performed within a defined space.
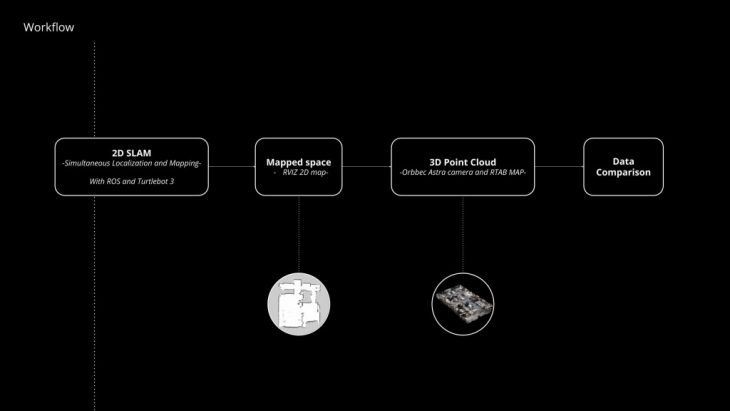
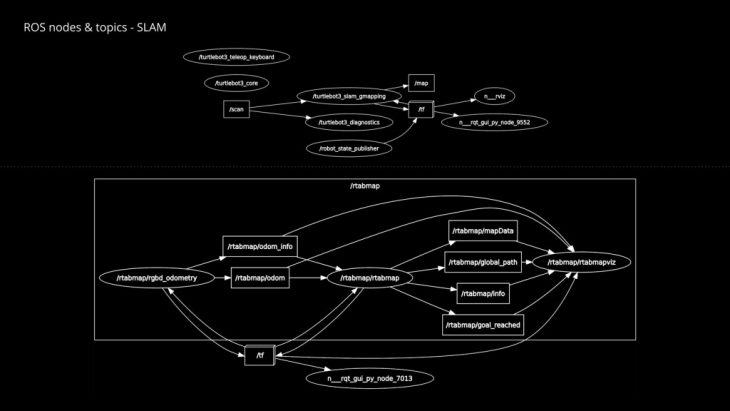
- Create a 2d SLAM floorplan
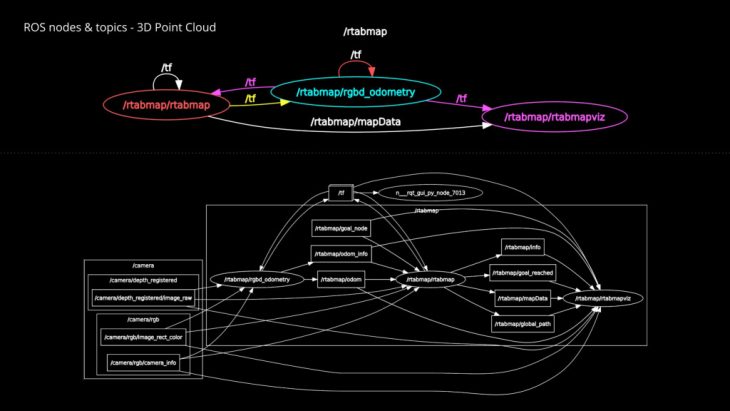
- Create a 3d pointcloud with Turtlebot3 and Orbbec Astra camera
- Compare the data
Workflow
Hardware

The space chosen is the first floor of Atelier at IAAC, here below is showed the first attempt of 2d slam for creating at first the floorplan
</p>
</p>
Output
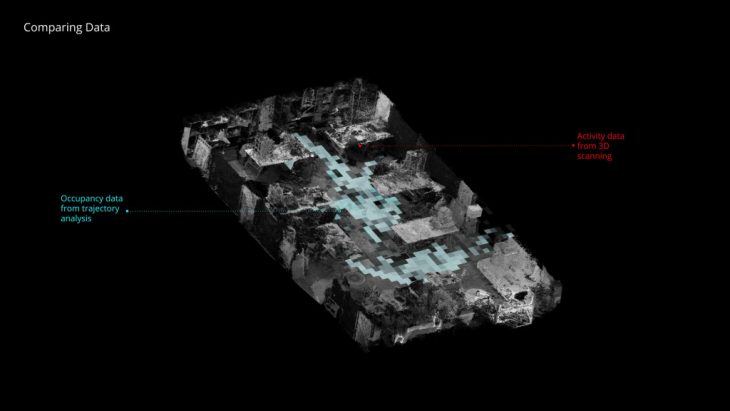
The point clouds generated from the turtlebot3 and from photogrammetry compared


The final step is then use the output to compare to the path data of space usage
Cloudy days is a project of IaaC, Institute for Advanced Architecture of Catalonia developed in the Masters of Robotics and Advanced Construction in 2019/20 by:
Students: Elena Jaramazovic, Gjeorgjia Lilo, Lorenzo Masini
Faculty: Carlos Rizzo, Soroush Garivani