Learning to be a space frame // Workshop 3.1
Digital iterations – form finding
The main focus of this workshop was to design using machine learning. The teams had to create a modular design composed of small identical cells. Each cell had to be assembled using 4mm rebar. Using the base design of a cell and controlling some parameters, the machine learning algorithm was able to generate cells which would fit inside the different parts of the final design. Structural calculations were also linked to the machine learning (using grasshopper and owl) algorithm & using Karamba which resulted in structurally stable final outputs.
Furthermore the workshop was accompanied by a fabrication workflow, where the free form space frame structure developed by the students were fabricated by a robotic bending process. In addition to optimization workflows with machine learning the students also learned to develop fabrication workflows, and prepare fabrication documents for robotic construction.
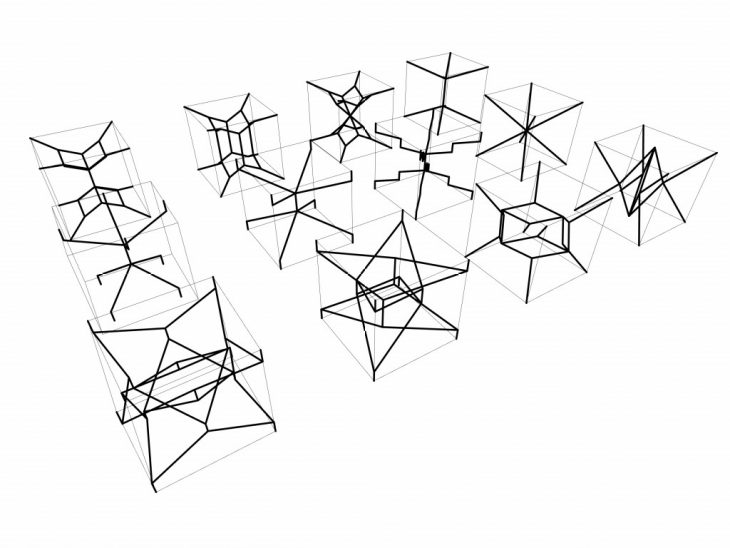
Variations / Form finding
Manual tests
First approach related to the original module to analyze
Once the base model design was decided. Manual tests were performed by the team, which comprised of 8 no. of 4 mm rebar. The main intention of the manual tests was to understand the behavior of the design and what changes/alterations might be required to make the design more stable and scalable.
First manual test
Further, second test was performed using 2 cells, in order to analyze the performance of the cells in combinations. Some issues were identified such as spring action. And required alterations were made to over the identified issues.
Second manual test / Structural behavior
Analysis process
As explained above, the main intention was to start with a single cell design and have some controlling parameters which can be fed in the machine learning loop in order to give the control to the neural network to generate sensible and meaningful shapes to feed in the final design.
In this project, we after the generation of single cell model, we have parameters which controlled internal, external geometry and also karamba parameters so that the cells remain structurally stable even after alteration by NN.
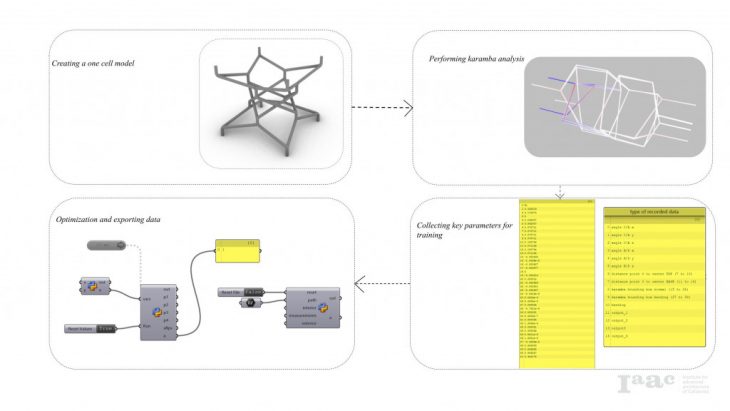
Analysis process
After extracting, all the parameters were fed in a loop, to save the data in a csv format. Final data comprised of internal geometry control (angles with in internal geometry, external bounding control, karamba displacement for members and the bounding box)
First analysis N.N.
First Cell’s Karamba analysis deformation
The dataset was feeded in a neural network algorithm for training using owl plugin in grasshopper which gave the trained neural network binary file.
Training validation
Creating database for A.I with Galapagos.
Galapagos’ training validation
Galapagos was used to check the best possible option for reducing the neural network error.
Final behavior analysis model
Final model’s behavior trainned
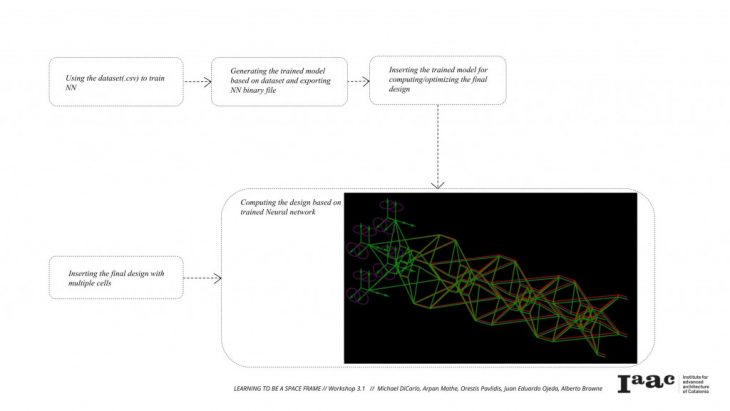
The trained neural network file was further fed in the final design algorithm which comprised of:
- The final design (multiples of the single cells-the basic cell design)
- Neural network algorithm which could compute using the trained neural network file and provide structurally stable possible solutions for each cell to fit inside the design
After obtaining the final model results, some issues were identified. The model was structurally unstable and as a result some new members had to be incorporated in order to balance the tension and compression in the design.
As a conclusion, the overall process carries extreme potential and can be incorporated in any design process but the parameters which drives the design of the cells are the most critical part of this process and have to be in accurate range which would give freedom to NN to find out wide range of options with better accuracy in terms of design and structural stability.
Robotic exploration
Accuracy improvements regarding to the module and stiffness.
Fabrication was a parallel process to continuously understand the need of alterations in fabrication and design. After manual exploration, first cell fabrication with 1:1 scale was performed to understand the is any underlying design issue persist, understanding assembling challenges after fabrication, etc.)
First robotic cell’s test
Initial robotic simulation model
Final Model
Final model
Video about the process
Conclusions
The design needs to provide enough freedom for the AI to be able to find the best solution. On the other hand fabrication has some limitations such as the length of the rebars, the minimum and maximum angle, the maximum amount of bends in a rebar, and the minimum length of a segment. As a conclusion, designing, optimization and fabrication should be interdependent procedures.
The chosen unit of this project has six bends and seven segments. Considering that maximum rebar length is 150cm and four of the segments have the minimum length (12cm), there is only 102cm available for the three diagonal segments. For the scale of the units this seems to be limiting the solutions of the AI. As future steps, the unit’s scale and proportions need to be reconsidered to allow the parameters that are fed into the AI enough freedom to drastically transform the unit to fit each occasion.
Learning to be a space frame // W 3.1 is a project of IAAC, Institute for Advanced Architecture of Catalonia
developed at the Master in Robotics and Advanced Construction workshop 3.1 in 2020/2021 by:
Students: Arpan Mathe, Alberto Browne, Michael DiCarlo, Juan Eduardo Ojeda, Orestis Pavlidis
Faculty: Zeynep Aksoez
Faculty Assistant: Ashkan Foroughi, Ricardo Mayor
