DUALSKIN
An Electric Field Sensing Wearable
For the published research paper:https://dl.acm.org/doi/10.1145/3341163.3346931

Figure 1. The user sensing electric fields from a vacuum cleaner.
Abstract
Humans are capable of identifying and categorizing objects in their environment with the aid of their sensory organs. Dualskin is a wearable which equips the user with ambient electroreception (electric field sensing). The aim of the project is to develop a new sense that will increase peripersonal space, alter the human perception and their relationship between electronic, organic and inorganic objects that surrounds our lives. Dualskin is a vest that uses a circuit which consists of embedded microcontrollers, sensors, and actuators. It uses capacitance sensors to sense surroundings and uses electrical stimulation as a feedback mechanism around the user’s waist.
Humans are limited by biology. We merely perceive the world in relation to the sensing range of our sensory organs. In the same reality, we can find gamma rays, radio waves, electric fields, colors, and sounds out of range to our senses. Although we are not aware of this reality, we do not miss it because we simply do not know what it is. For instance, when asked to a blind man, they fail to understand what vision is as a healthy person can not imagine a new color or imagine sensing ultraviolet light. Other animals have different sensory organs for different signals. A shark’s world is made up of electric fields, while bat’s reality is guided by soundwaves. We fail to imagine their perception of reality as they fail ours. If we were to have electroreception (electric field sensing), our awareness towards our surroundings, our relationships between each other, and our understanding of electronic and organic objects would be different.
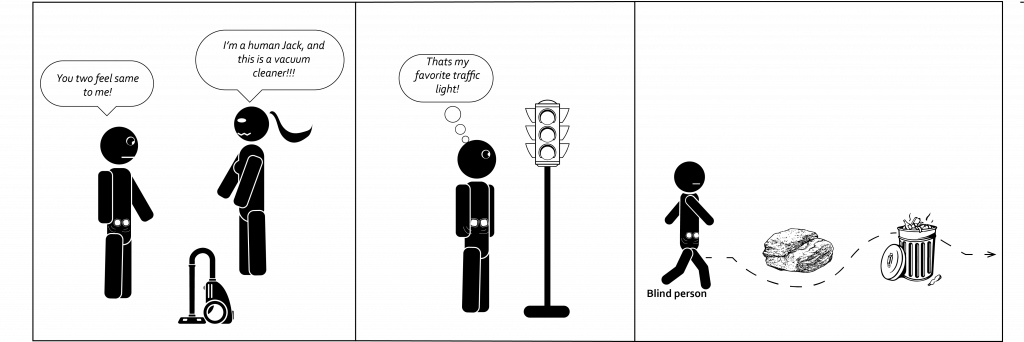
Figure 2. Possible scenarios that can be achieved by ambient electric field sensing.
If we possess a new sense that senses the objects and uses the same feedback for different objects; would our perception towards that object change? Can we change our biases towards algorithms and electronics if we were to perceive them as we sense humans? Would this lead to more empathetic relationships with other humans? Can we alter our perception of reality through electroreception? Dualskin seeks to discuss these questions.
Contributions
The main contributions identified in this project are:
- New ambient sense for humans that will enable novel interactions with their surrounding.
- Generic sensing of diverse kinds of objects, from organic to inorganic.
- Potentially new sense for impaired individuals to adapt and react to their surroundings.
Electroreception — Electric Field Sensing
Unlike some animals, humans do not have an organ for sensing electric fields. For many millennia, sharks have been guided by their sense for electric fields. Every object has an electrical charge and it changes based on if the object is organic, electronic, or conductive.
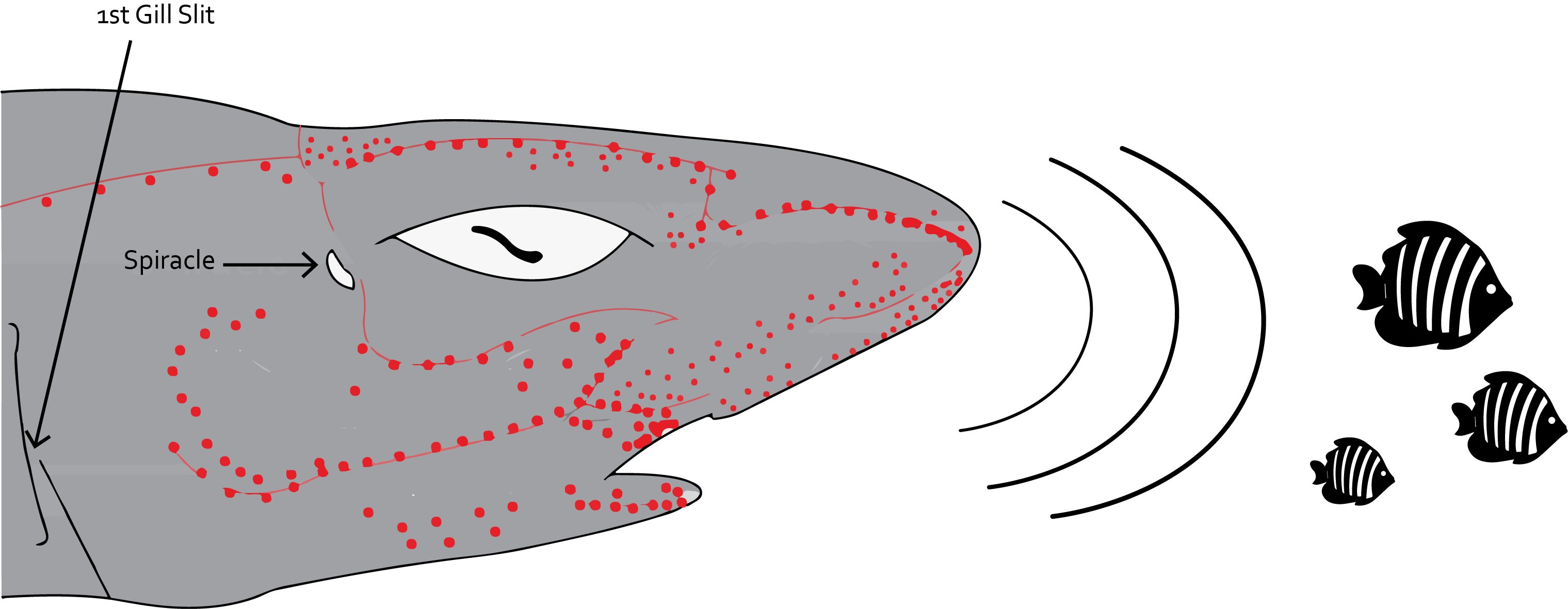
Figure 3. Electroreceptors (Ampullae of Lorenzini) and lateral line canals in the head of a shark.
If humans had electroreception, we could feel the presence of electronic, organic or inorganic objects around us, which would contribute to a more sophisticated perception of our surroundings. We would be able to sense objects that are out of our sight and we would feel the omnipresent phase and amplitude of the power line electric field which would help us to determine our position within a room. Perhaps we wouldn’t need to rely on light in known dark indoor environments.
Research Claims

Figure 4. Illustration of claims in order.
The Dualskin will change my relationship with other people and objects, organic or inorganic while creating a new way of empathy. — In a series of researches, it was understood that electroreception would alter our perception and enable humans to sense the mood of the individuals as well as each others heartbeat. Feeling each other in another way would help to create a new way of empathy.
Electro-stimulation is stronger and more modifiable than other haptic options. — In research on pseudo-haptic mechanisms, electrical stimulation have been used to create a new or mimic haptic feeling.
Another research was exploring the ways of creating muscle memory and assisting doctors in surgeries by neuromuscular electrical stimulation.
Dualskin will modify my perception of reality. — Perception of reality is a combination of sensory inputs. If we were to sense more, it would contribute a more complex understanding of ourselves and our surroundings.
Dualskin will enable me to enhance peripersonal space. — Peripersonal space is increased by different activities; while a cyclist can feel the extensions of the bike, a pilot can feel the wings of the wing. If a human were to actively sense their surroundings, that would contribute an increased feeling.
Electro-stimulation is stronger and more modifiable than other haptic options. — In research on pseudo-haptic mechanisms, electrical stimulation has been used to create a new or mimic haptic feeling.
Another research was exploring the ways of creating muscle memory and assisting doctors in surgeries by neuromuscular electrical stimulation.
Development
The project development started with research related to ambient sensing and their possible effects on our perception. While the concept was maturing, earlier iterations were developed using several sensors and actuators.
Initially, the Arduino Cap Library was used to read and process the capacitive sensor input with an Arduino Nano microcontroller. The MCU was later replaced with the FDC2214 capacitive sensor because it can manage the general signal noise related to sensing EMF. The FDC2214 capacitive sensor was directly connected to woven conductive textile patches around the garment via the conductive fabric and to the microcontroller which was connected to the TENS device. In order to avoid noise, the capacitance of the body was set as a minimum value which allowed the sensor to ignore the effect from the user’s body.
Computational tools and digital fabrication methods were heavily used during design development while four aspects have been considered and addressed equally to create a coherent design product:
- Wearability and comfort
- Aesthetics which reflect the nature of the garment
- Reusability and rechargeability
- Skin safe materials and washability.
First Iteration
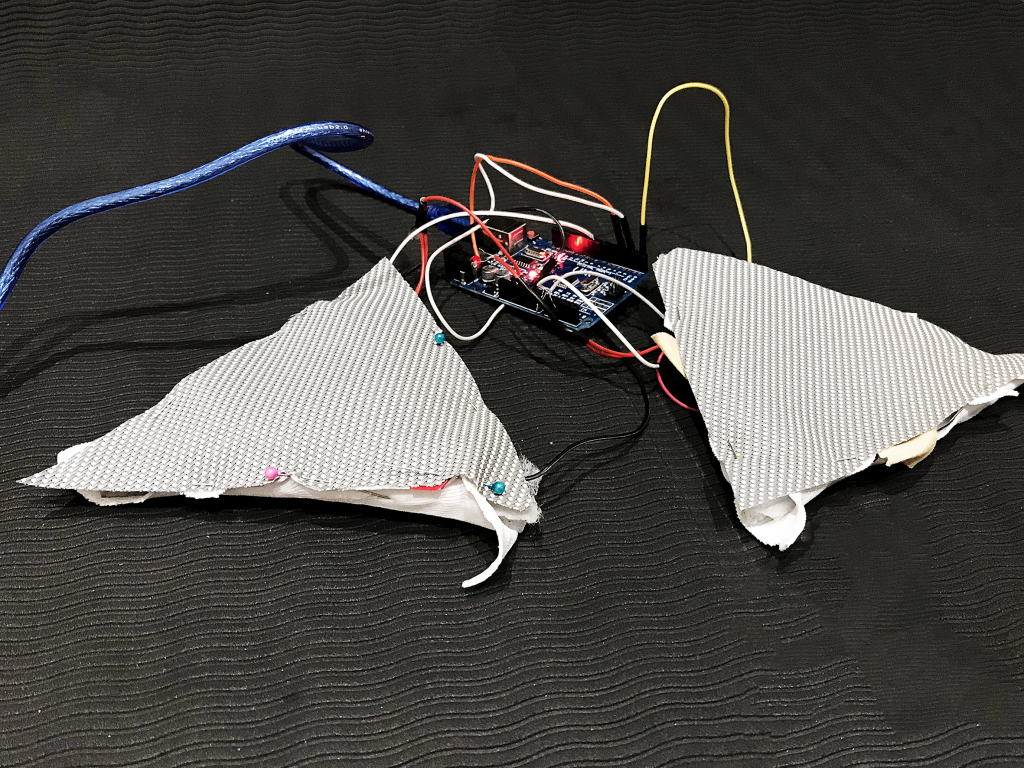
Figure 5. First iteration made by Arduino Cap Library and vibration motors.
Exploration
The first phase of the project began with two main aspects that were addressed in parallel: material and hardware research. Arduino Cap Library and vibration motors are used. The main objective was to understand the capabilities and limitations of the capacitive sensor and while finding an effective feedback mechanism.
Conclusion
The distance of the sensor was in direct relation with the surface area of the conductor rather than its shape (Figure 7 in the data collection section). Merely by increasing the surface area of the conductor (aluminum foil), it was possible to sense humans and conductive surfaces approximately from 20 cm, vacuum cleaner approximately from 150 to 200 cm, and CNC mill from 200 cm and more. Another conclusion was that the vibration motors were not as effective as a high-resolution feedback mechanism and were removed from the design.
Second Iteration

Figure 6. Second iteration with Arduino Cap Library, woven conductive textile, ITO as sensor setup. TENS unit as a pseudo-haptic feedback mechanism.
Exploration
After the first iteration, the vibration motors were switched with electrical stimulation as the haptic feedback mechanism because they were not creating as noticeable or controllable haptic queues. In the second phase, more intensive research focused on electrical stimulation and the effects of electricity on the body as well as more hands-on experimentation process for testing new materials as conductors and the garment.
Conclusion
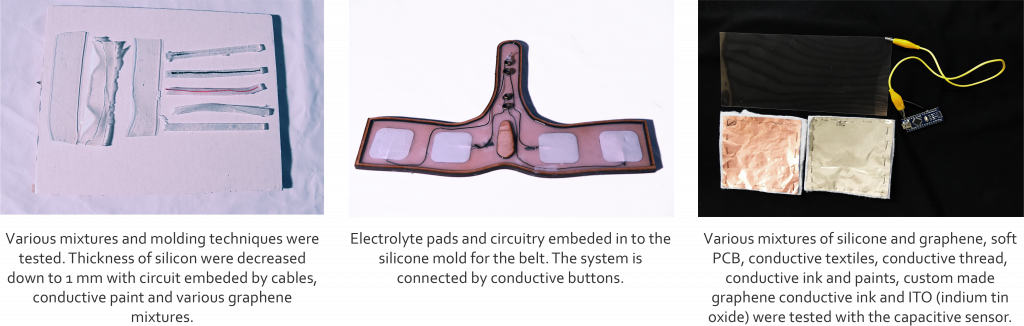
In order to avoid possible myocardial infarction due to electricity, the flow of the electrical current should not pass through the heart and chest area. Thus the electrolyte pads are placed around the waist of the user, taking into consideration usability, comfort and health issues. Various mixtures of silicone and graphene, soft PCB, conductive textiles, conductive thread, conductive ink and paints, custom made graphene conductive ink and ITO (indium tin oxide) were tested with the capacitive sensor. Although the conductive textiles and various conductive inks worked in a similar fashion, silicone-graphene mixtures failed to be conductive and graphene ink had a high amount of resistance which could be reduced by more development time. ITO sheets proved to be effective but required large area contacts and conductive thread did not create this surface area.
Data Collection
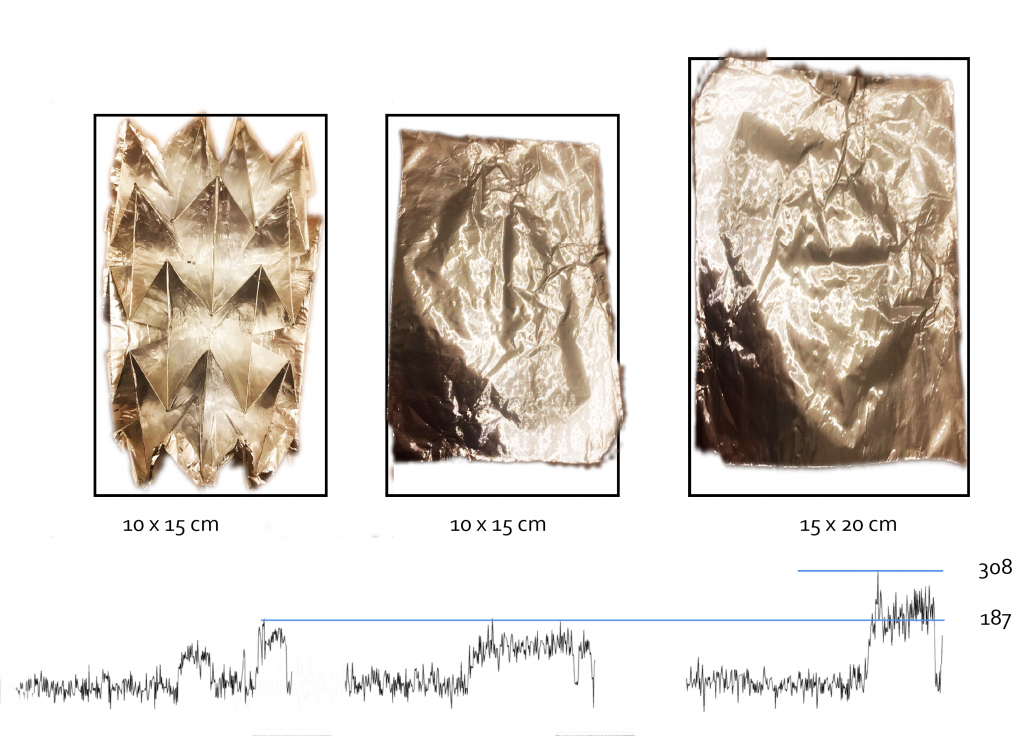
Figure 7. Example of experiments done for comparing materials, surface and geometrical differences.
Data collection period occurred in two phases; for the beginning, we had to be sure of the reliability of the capacitance sensor. Graphene-silicon mixture, aluminum foil, ITO (indium tin oxide), smart textiles, soft PCB, conductive ink and graphene-ink were tested. Later on, different geometries were tested to understand if sensors work solely based on the surface area or the geometry (Figure 7). As a result, we found out that geometry had no effect whatsoever but it was the surface area of the material which made a difference.
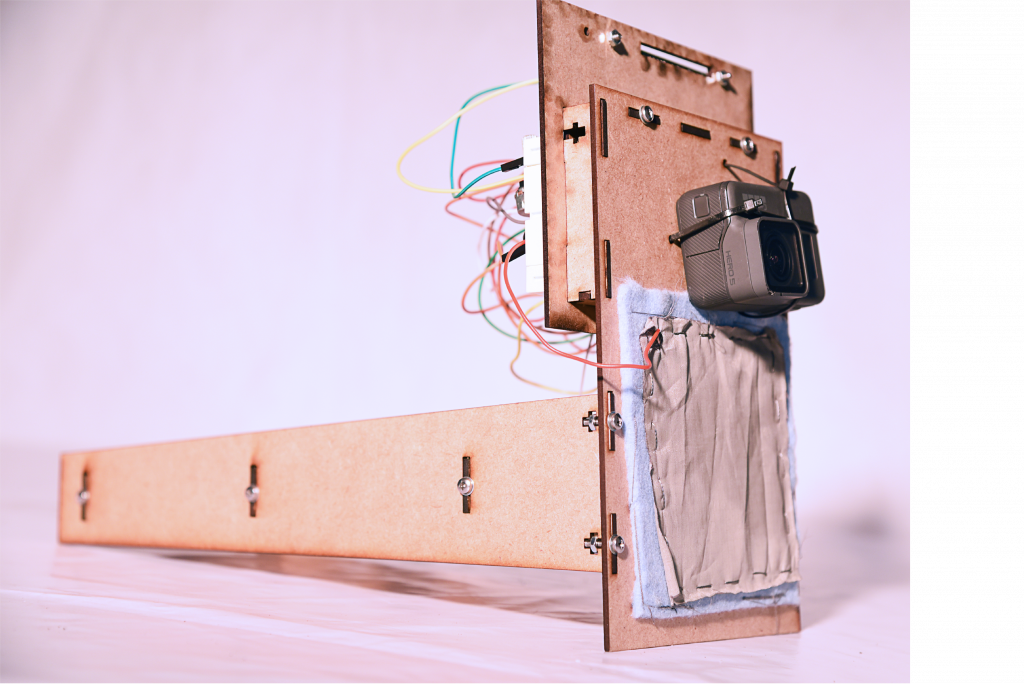
Figure 8. The device that was designed for capacitive data collection, and to embed the video and the data together.
To facilitate further testing, a tool was developed(Figure 8 ) to measure the capacitance of objects and shoot the video at the same time. By compiling the data and the camera footage, some interesting results were achieved. This test was developed by using Arduino Cap Library for capacitive sensing with 10cm x 10cm conductive textile as a conductor. As a result, it was capable of sensing the trees and ground approximately from 20 to 40 cm, vacuum cleaner from 150 to 200 cm and CNC milling from 200 cm and more. Upon more tests related to the findings, it was discovered that some of the data was incorrect due to EMF interference, especially from fluorescent lights. Due to the possible faulty data, Arduino Cap Library and the custom sensor were switched for the FDC2214 EMF noise immune sensor.
Final Prototype

Figure 10. Front and back view of Dualskin.
A final design was created as a vest using the 3D scan of our body for base measurements, taking comfort and usability into consideration. The woven conductive textile and conductive thread were used as sensor setup. The microcontroller and the sensor were placed on the chest area because the objects that are 5 to 10 cm and 2.25 to 4 kg do not create discomfort or obstruct the view or natural movement of the body in the chest area. As for the electrostimulation, electrolyte pads are placed behind the leather panels around the waist which allows us to avoid heart area.

Figure 11. Silicon belt with custom electrolyte pads which has been removed from the garment due to inefficiency and lack of self-sufficiency.
At this phase, any silicone material was removed from the garment as it creates comfort and washability issues and is not suitable for hot environments. Also, degradation occurs in the long term because of the UV exposure from the sun and electrical charge/discharge(Figure 11). The Arduino Cap Library and custom made capacitive sensors were replaced by the FDC2214 capacitive sensor which is immune to noise and enables us to sense a hand approximately 80 cm away with a 10cm x 10cm conductive surface.
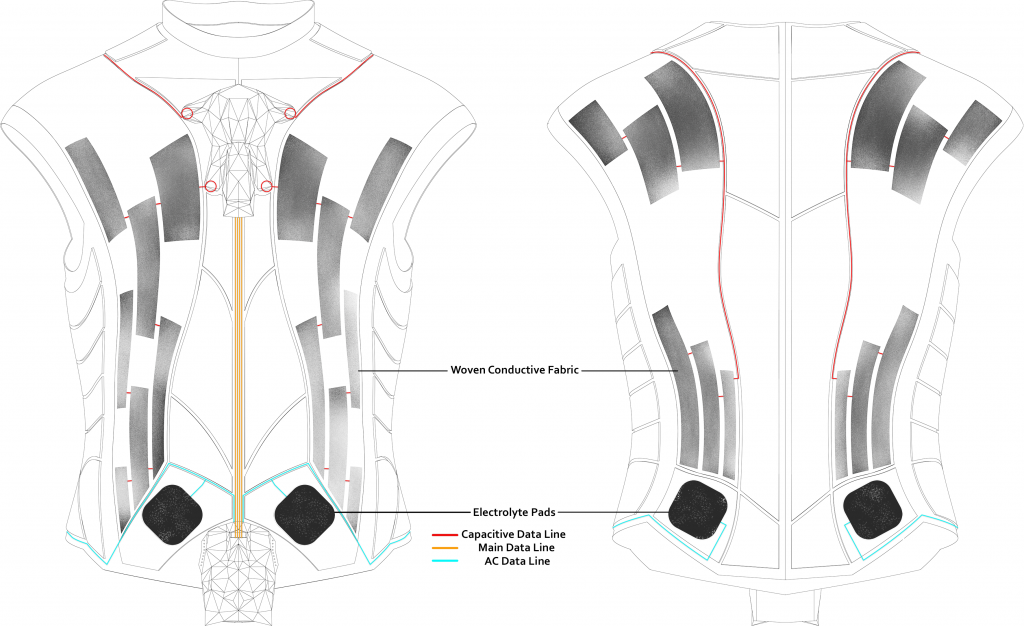
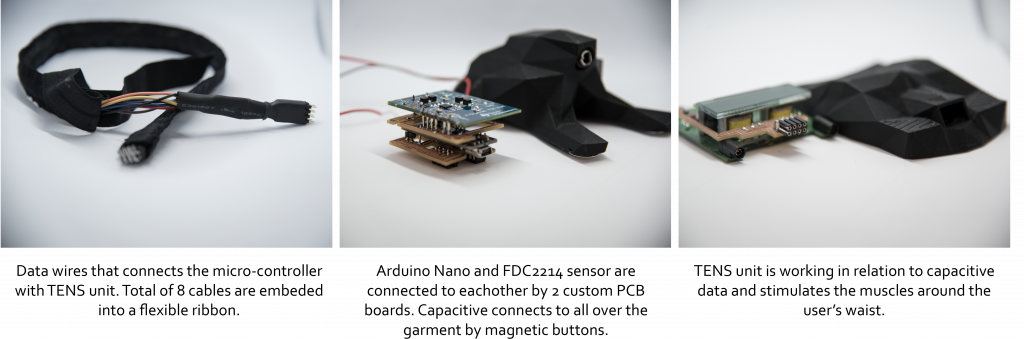
Figure 12. Circuit diagram of the final garment.
There are three 3D printed containers that house an Arduino Nano board, two custom PCB boards, FDC2214 sensor, 9-volt rechargeable battery, and a TENS device. The garment is divided into four sections that are covered by woven conductive textile patches which are connected to the magnetic buttons on the chest and to each other by a conductive thread. When the main container and battery is attached to the vest by magnetic buttons, the garment and starts measuring the ambient capacitance. If the TENS device is attached, it starts electrostimulation around the waist in direct relation to the amount of ambient capacitance sensed by the garment.

Figure 13. Modular battery and microcontroller connection.
The electronic parts can be easily attached or detached through magnetic buttons. When they are attached, they complete a circuit of conductive threads, conductive textiles, and conductive buttons, and the device starts operating. If they are detached, the garment can be dry cleaned or hand washed.
Project Consequences
Personal Space — Dualskin is an ambient sensing device, which means the user is able to sense people around them without having to have visual contact. This can be considered an invasion of privacy or personal space by people accustomed to their large personal spaces. The user might be enjoying sensing their surroundings and might try to get close to people in order to enhance the feeling.
Electrostimulation — Several people raised their concerns about the electrical stimulation, and they were afraid to touch the user with fear of getting shocked. In public, this could create a general bias towards the users of this garment.
Garment Design — Because of the aesthetical transparency of the garment, it would be challenging to use in conservative countries.
Dualskin is a project of IaaC, Institute for Advanced Architecture of Catalonia developed at the Master in Advanced Architecture Student: Doruk Y?ld?r?m Faculty: Luis Fraguada, Elizabeth Bigger Physical Computing Expert: Cristian Rizzuti
