 Current scanning technology is used to better inform BIM technologies. Construction Cognification aims to complete the loop through introducing the physical into the autonomous scanning and manipulation of live and unknown typologies for adoption within construction
Current scanning technology is used to better inform BIM technologies. Construction Cognification aims to complete the loop through introducing the physical into the autonomous scanning and manipulation of live and unknown typologies for adoption within construction
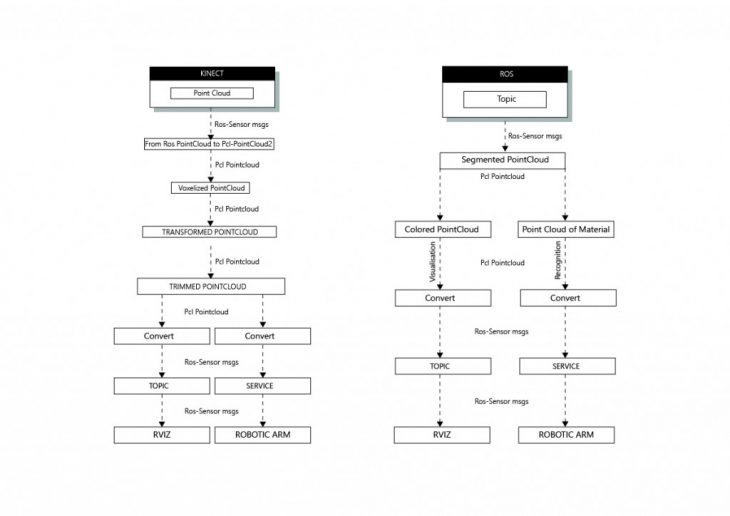
Using state of the art technology to collect data from the physical world, we then interpreted it through our custom middle ware solution to then be manipulated via the use of an industrial robotic arm.
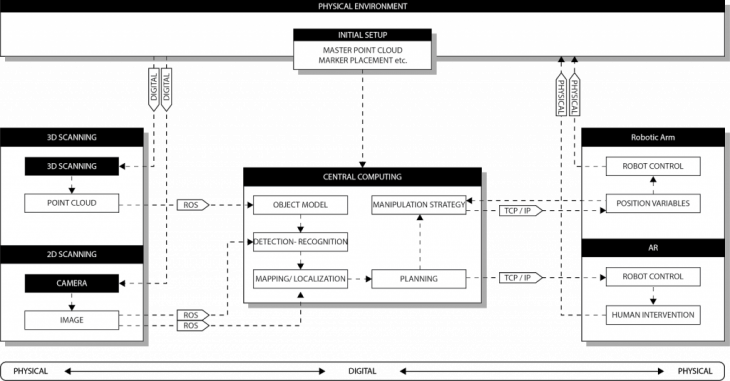
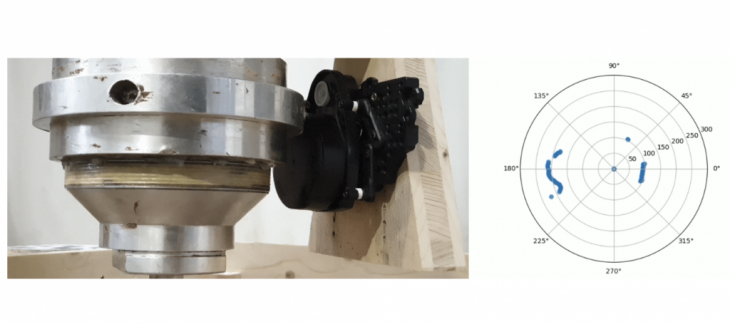
Integrated systems included point clouds, augmented reality markers and online programming to the control pc of the robot. Positioning was setup in real time that the software was continually orientated to the real world position of the robotic arm.
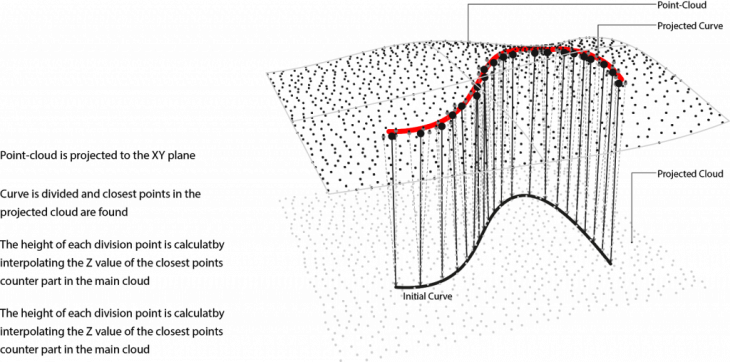
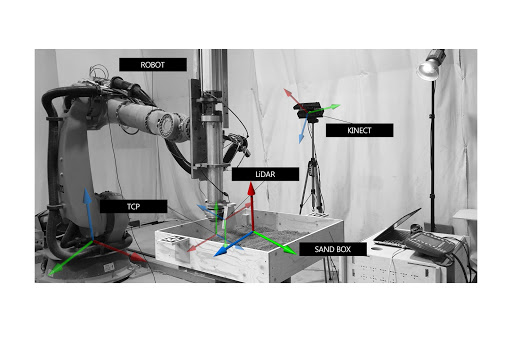
LiDAR was used to generated continuously updated pathing to the arm to generate automatic pathing over an unknown aggregate surface, in our example it was sand with an unknown height. We see the developed software as a real world solution to offline programming and advanced solution where predetermined pathing is not possible.
Video:
Students: Riccardo Mura, Hazal Yilmaz, Ardeshir Talaei
Faculty: Aldo Sollazzo, Starsk Lara